Recent News



Research Projects
See all projects.
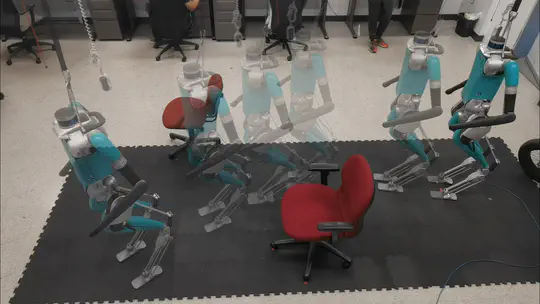
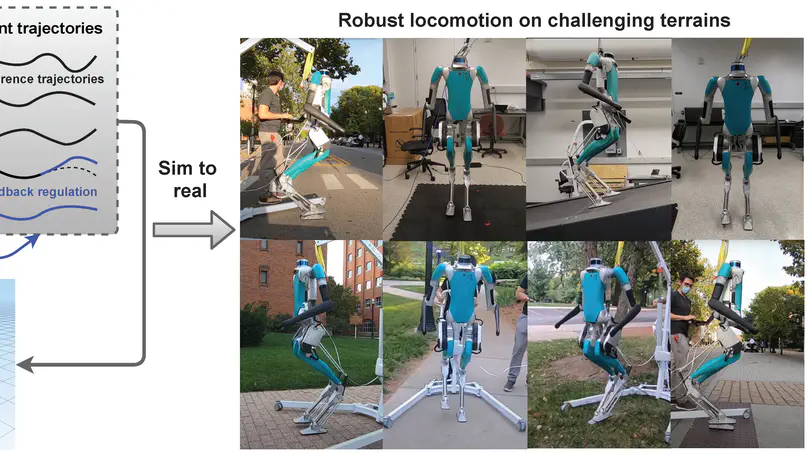
Our research focuses on developing advanced algorithms and technologies to enable humanoid robots to perceive their environment, navigate autonomously, and achieve human-like locomotion.
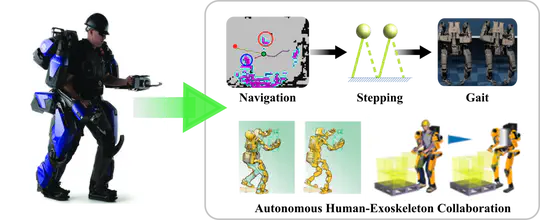
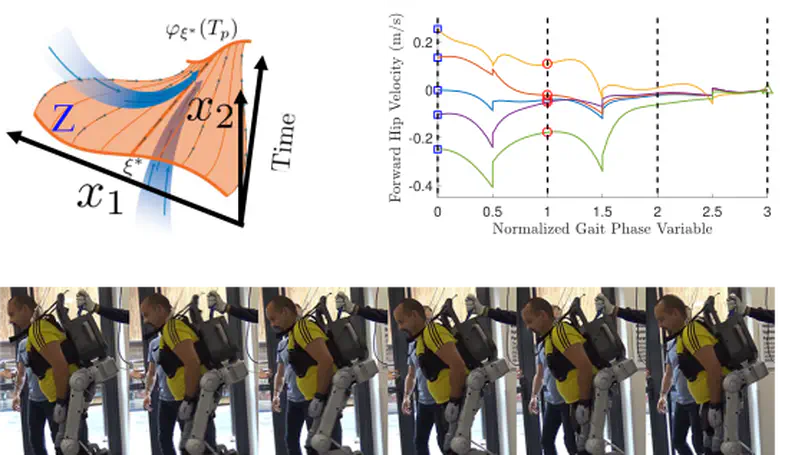
Our primary objective is to enhance industrial assistance and automation by combining the strengths of human-like locomotion and exoskeleton technology, thereby promoting the commercial use of powered exoskeleton for human-machine collaboration in various industrial settings.
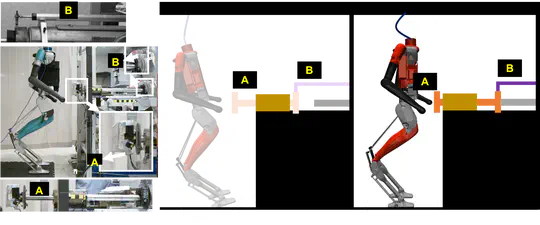
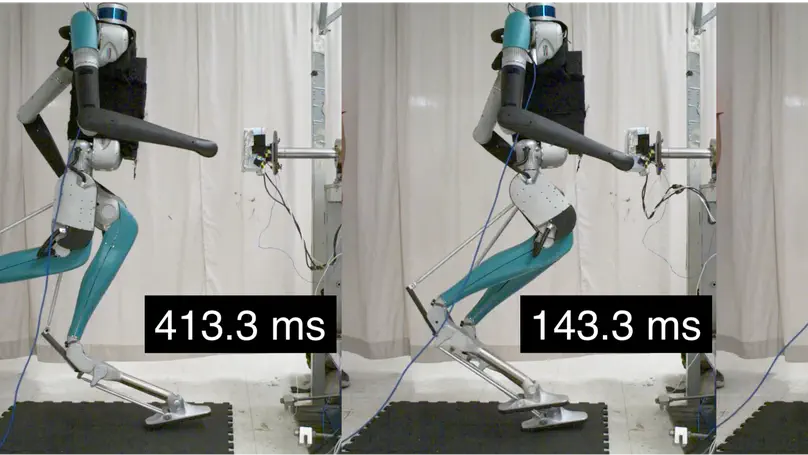
As legged robots become increasingly prevalent in various applications, it is crucial to develop robust safety testing methodologies to identify potential risks and ensure safe operation.
Featured Publications
Towards Standardized Disturbance Rejection Testing of Legged Robot Locomotion with Linear Impactor: A Preliminary Study, Observations, and Implications.
arXiv preprint arXiv:2308.14636,
2023.
Safe Bipedal Path Planning via Control Barrier Functions for Polynomial Shape Obstacles Estimated Using Logistic Regression.
2023 IEEE International Conference on Robotics and Automation (ICRA),
2023.

Reinforcement learning-based cascade motion policy design for robust 3D bipedal locomotion.
IEEE Access,
2022.
Dynamic locomotion of a lower-limb exoskeleton through virtual constraints based zmp regulation.
Dynamic Systems and Control Conference (DSCC),
2020.

Feedback Control of an Exoskeleton for Paraplegics: Toward Robustly Stable Hands-free Dynamic Walking.
IEEE Control Systems Magazine,
2018.
Popular Topics
atalante
control
control barrier function
control Lyapunov function
direct collocation
exoskeleton
frost
humanoid
hybrid zero dynamics
learning
motion planning
motion primitives
multi-contact locomotion
reinforcement learning
robust locomotion
safety testing
speed regulation
template model
trajectory optimization
virtual constraints