Hybrid Locomotion Control for Industrial Full Body Exoskeletons
Introduction
Industrial settings often require complex tasks that involve physical exertion, precision, and endurance. While traditional robotic systems have made significant advancements in automation, they often lack the versatility and adaptability of human workers. Hybrid humanoid/exoskeleton systems offer a promising solution by combining the dexterity and cognitive abilities of humans with the strength and endurance provided by exoskeleton technology. However, developing effective locomotion control designs for such systems poses several challenges.
We strive to develop, integrate, and validate a new AI / ML framework for reinforcement learning-based hybrid locomotion control for a hybrid humanoid-exoskeleton to enable the robot to improve the overall dexterity/mobility/safety/autonomy with and without the human operator in it, thereby promoting the commercial use of full body powered exoskeleton for human-machine collaboration in various industrial settings. Our collaborative work will focus on developing locomotion control designs that seamlessly integrate human-like locomotion and exoskeleton assistance for industrial assistance and automation. By collaborating with industry leaders, we ensure that our research aligns with the practical needs and requirements of industrial assistance and automation. These partnerships also enable us to conduct real-world testing and gather valuable feedback for further improvements.
Research Focus
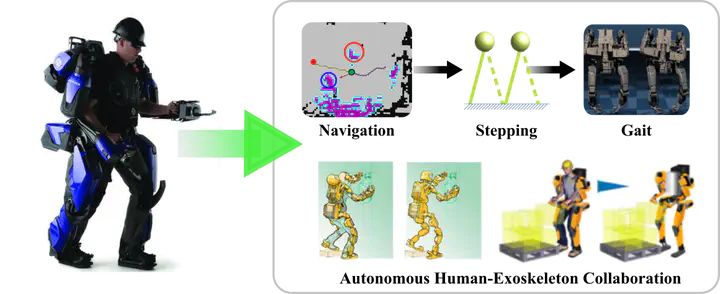
Development of A Novel Motion Learning Framework for Hybrid Locomotion: The project will leverage domain-specific hierarchical reinforcement learning (HRL) to efficiently learn stable and safe walking gaits for the Guardian XO platform. By breaking down complex tasks into simpler sub-tasks, HRL enables the generation of stable walking gaits and equips the resulting policy with the capability to respond to various commands, facilitating autonomous locomotion. This innovative approach to motion learning has the potential to revolutionize the field of robotics and enable non-expert users to collaborate with (semi)autonomous robots effectively.
Investigation of Safety-Critical Whole-Body Control for the Guardian XO Platform: The project will explore the principles governing whole-body coordination with contact dynamics and control barrier function (CBF) based safety-critical controllers. By understanding the physical interaction between the human operator, the robot, and the environment, the project aims to improve stability, balance, and safety during operations. This research will contribute to the development of physically autonomous Guardian XO platforms, enhancing their dexterity and safety in performing locomotion tasks.
Applications
The collaborative work on hybrid humanoid/exoskeleton locomotion control design has significant implications for industrial assistance and automation. Some of the potential applications of our research include:
Heavy Lifting and Manipulation: Hybrid humanoid/exoskeleton systems can assist workers in lifting and manipulating heavy objects in industrial settings. Our locomotion control designs enable precise and coordinated movements, enhancing the efficiency and safety of such tasks.
Repetitive and Fatigue-Prone Tasks: In industries where workers are required to perform repetitive tasks that can lead to fatigue and musculoskeletal disorders, hybrid humanoid/exoskeleton systems can provide assistance and reduce the physical strain on the operators. Our control designs aim to optimize the coordination between the human and the exoskeleton to minimize fatigue and improve productivity.
Precision Assembly and Manufacturing: Hybrid humanoid/exoskeleton systems can be utilized in precision assembly and manufacturing processes, where accuracy and dexterity are crucial. Our research focuses on developing control algorithms that enable precise and coordinated movements, allowing operators to perform intricate tasks with enhanced efficiency and quality.
Hazardous Environments: In industries with hazardous environments, such as nuclear power plants or chemical facilities, hybrid humanoid/exoskeleton systems can provide assistance to workers by reducing their exposure to risks. Our locomotion control designs aim to enhance the safety and efficiency of tasks performed in such environments.
Summary
Our collaborative work on hybrid humanoid/exoskeleton locomotion control design for industrial assistance and automation aims to revolutionize the way tasks are performed in industrial settings. By combining the strengths of human-like locomotion and exoskeleton technology, we strive to enhance efficiency, safety, and productivity. Through ongoing research and collaborative partnerships, we are committed to advancing the field and contributing to the development of innovative solutions for industrial assistance and automation.