Safety Testing of Legged Robots
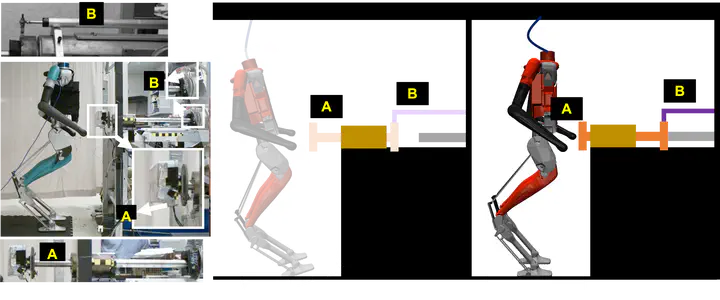 A potential testing configuration of legged robots safety.
A potential testing configuration of legged robots safety.Introduction
Safety testing plays a vital role in the development and deployment of legged robots. Legged robots operate in dynamic and unpredictable environments, making it essential to assess their performance and behavior to prevent accidents and ensure the safety of humans and the robot itself. Our collaborative research aims to develop comprehensive safety testing methodologies that address the unique challenges posed by legged robots.
Dynamic locomotion in legged robots is close to industrial collaboration, but a lack of standardized testing obstructs commercialization. The issues are not merely political, theoretical, or algorithmic but also physical, indicating limited studies and comprehension regarding standard testing infrastructure and equipment. For decades, the approaches we have been testing legged robots were rarely standardizable with hand-pushing, foot-kicking, rope-dragging, stick-poking, and ball-swinging.
Research Focus
Performance Standards: Clearly define the parameters and standards for testing the performance of legged robot locomotion and navigation, distinguishing between functional, efficient, and optimal performance levels.
Testing Algorithms: Develop testing algorithms that are fair, repeatable, and practical for assessing legged robot performance.
Testing Infrastructure: Create testing infrastructure and equipment capable of executing the proposed algorithms at various fidelity levels, including physical testing in indoor labs and outdoor environments, computational testing in simulators, and hybrid configurations with hardware-in-the-loop.
Experimental Testings: Conduct experimental validation of the above objectives using a variety of legged robots, including quadrupeds, bipeds, and humanoids.
Compliance with Standards and Regulations: Work closely with regulatory bodies and industry partners to understand the requirements and develop testing methodologies and testing standards.
Applications
The collaborative research on safety testing of legged robots has significant implications across various domains. Some of the areas where our work can have a significant impact include:
Industrial Automation: Legged robots are increasingly being used in industrial settings for tasks such as inspection, maintenance, and logistics. Our research aims to ensure the safety of these robots in industrial environments, where they may interact with humans and operate in complex and dynamic spaces.
Search and Rescue Operations: Legged robots have the potential to assist in search and rescue operations in hazardous environments. By conducting safety testing, we can ensure that these robots can navigate challenging terrains and perform their tasks without endangering themselves or the rescue personnel.
Summary
Our collaborative research on safety testing of legged robots involves partnerships with industry leaders, academic institutions, and regulatory bodies. By collaborating with experts in robotics, safety engineering, and relevant domains, we can leverage diverse perspectives and expertise to develop comprehensive testing methodologies. Through our collaborative research efforts, we aim to advance the field of safety testing for legged robots, enabling their safe integration into various applications. By addressing the unique challenges posed by legged robots and working towards compliance with standards and regulations, we strive to promote the responsible and safe use of these advanced robotic systems.